















Core tasks
Based on the self-developed servo control system with precision force control as the core, DH-Robotics provides customers in various industries around the world with a variety of intelligent grasping products, which are well adapted to various scenarios such as detection, sorting, handling, and assembly, it provides higher accuracy, better usability and stronger stability for intelligent manufacturing capabilities .
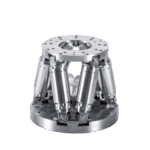
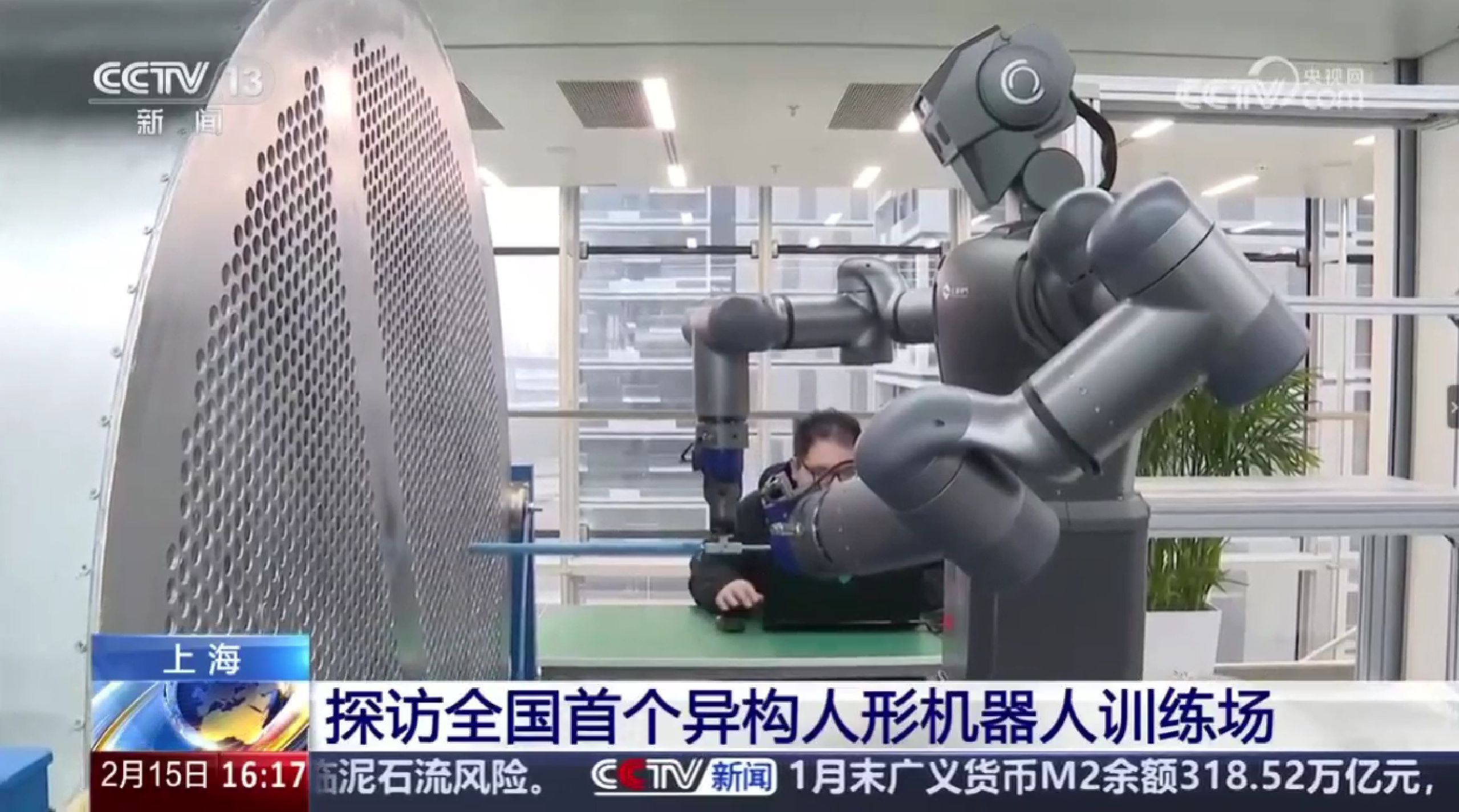
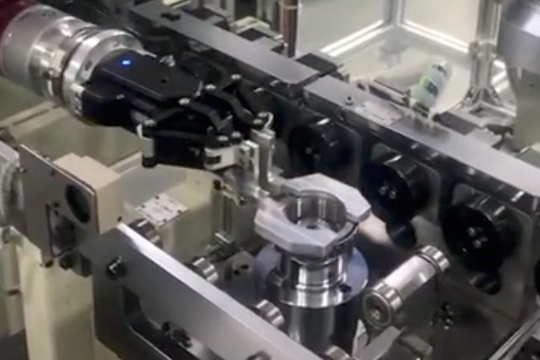
PGC Washable Gripper + Shanghai Electric Humanoid Robot | Simulated Nuclear Tube Sheet Cleaning: IP67 Waterproof Gripping in High-Pressure Water Environment
The DH-Robotics PGC electric gripper features an IP67 waterproof rating, enabling it to withstand high-pressure water flushing and corrosive environments for gripping in high-pressure water conditions and corrosion-resistant grasping. With ±0.03 mm repeatability, it securely holds cleaning nozzles to perform heat exchanger tube sheet cleaning and alloy tube sheet descaling. The easy-to-clean surface design and user-friendly control interface make it ideal for training scenarios requiring frequent cleaning task changes. This solution provides a reliable end effector for nuclear facility maintenance and specialized environment automation, supporting technical validation of humanoid robot training grounds in complex industrial settings.
Application Products

PGC Electric Gripper for Humanoid Robot | Precision Force-Controlled Mixed Sorting at Lingyi iTech Warehouse
Integrated with Lingyi iTech’s production line, a humanoid robot equipped with an electric gripper performs automated material sorting and synchronized gripping with object recognition. The PGC electric gripper leverages precision force control technology to enable force‑controlled, damage‑free gripping in mixed‑material environments, while ensuring efficient and stable gripper stroke for automated sorting. Additionally, the PGC gripper supports customizable fingertips – interchangeable in material and shape to match different material types – further improving gripping adaptability and reliability. This solution provides a dependable end effector for smart logistics and embodied AI scenarios, driving warehouse automation toward greater flexibility and intelligence.
Application Products

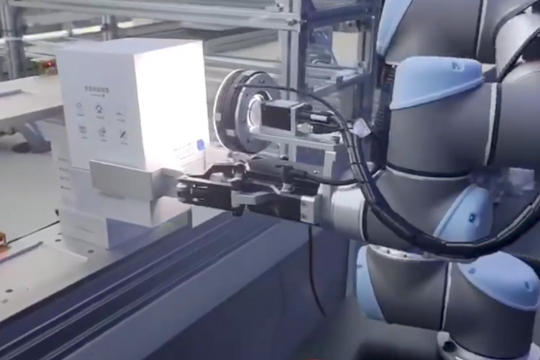
PGC Electric Gripper | Power Battery Cell Loading & Unloading: Precision Force-Controlled Handling for SAIC-GM & AgiBbot Lines
Integrated with the SAIC-GM and AgiBot automated production lines, the DH-Robotics PGC electric gripper leverages its precision force control technology to achieve flexible gripping and smooth handling of battery cells, effectively avoiding surface scratches or indentations. Compared to traditional pneumatic grippers, this electric gripper can dynamically adjust gripping force and position feedback during cell loading, significantly improving the yield rate and production stability of the PACK automated line. This solution is widely applicable to lithium battery cell assembly, prismatic cell gripping, and automatic cell loading, providing a reliable end effector for lithium battery equipment and new energy manufacturing.
Application Products

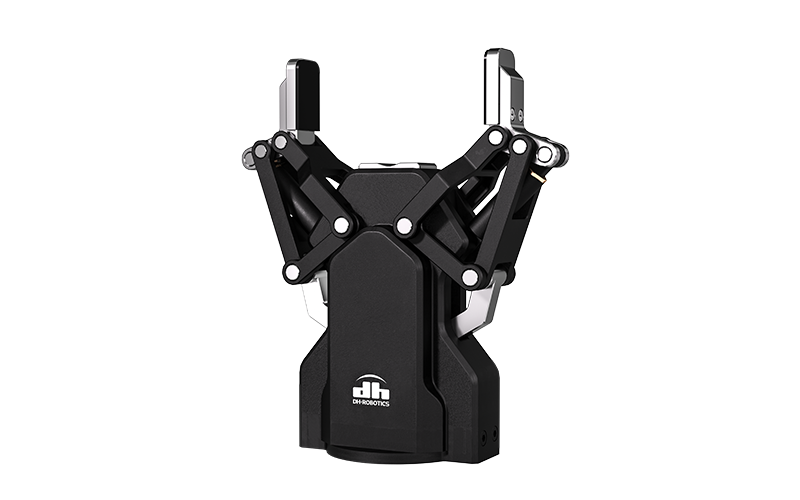
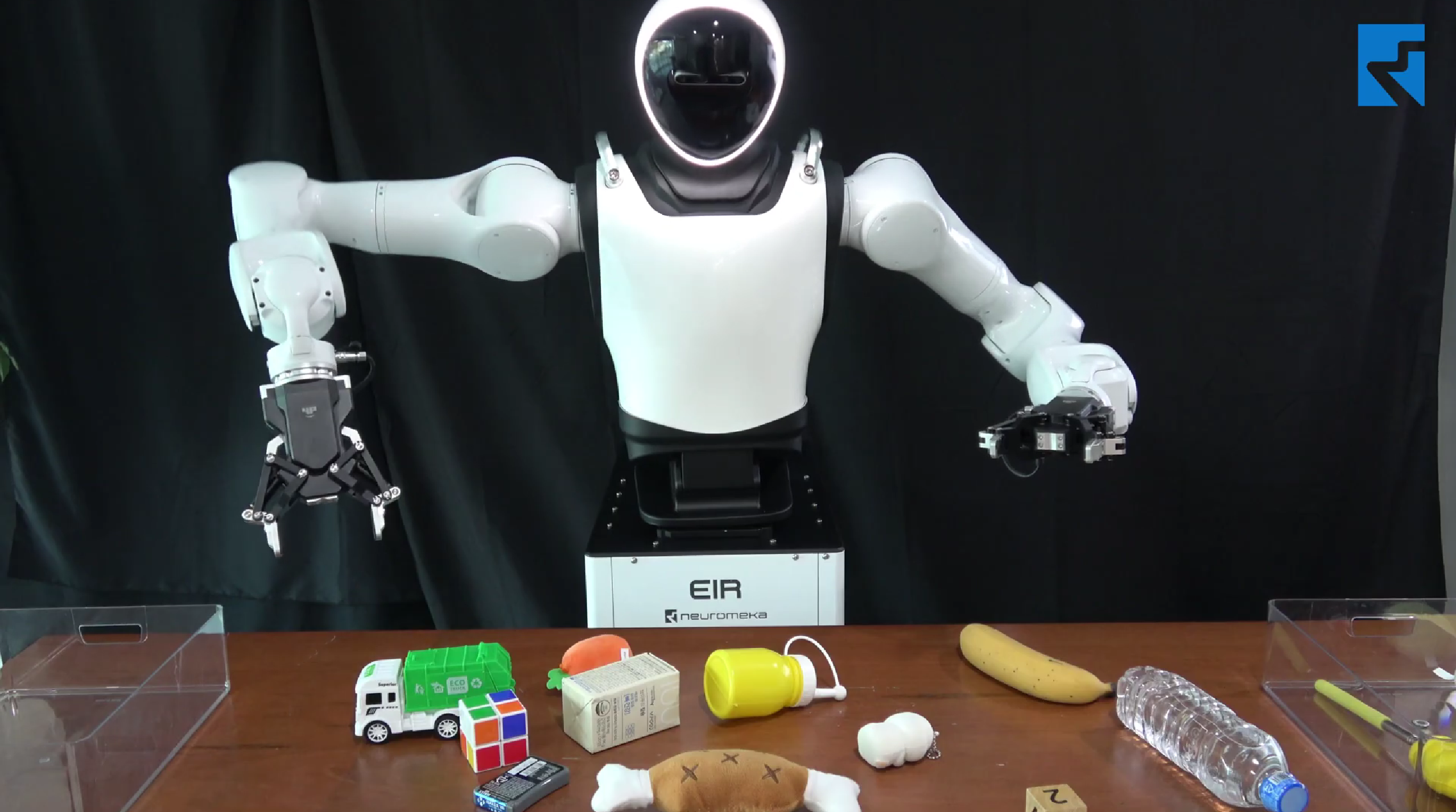
AG Adaptive Gripper + Neuromeka | Zero-Shot Gripping of Unknown Objects: Multi-Object Grasping Without Training
The DH-Robotics AG adaptive gripper features an articulated adaptive structure that automatically conforms to unknown objects of varying shapes, curved surfaces, and different hardness levels. Integrated with Neuromeka’s Zero-shot technology, it makes instant gripping decisions without prior training. The long stroke and large gripping force provide a physical foundation for generalized grasping, while the plug-and-play design enables fast coordination between AI decision-making and gripper actions. This demonstration embodies the zero-shot grasping capability of embodied AI — adapting to any object shape in real time without relying on pre-trained models. It offers a reliable end-effector solution for cutting-edge applications such as general object manipulation and open-set sorting.
Application Products
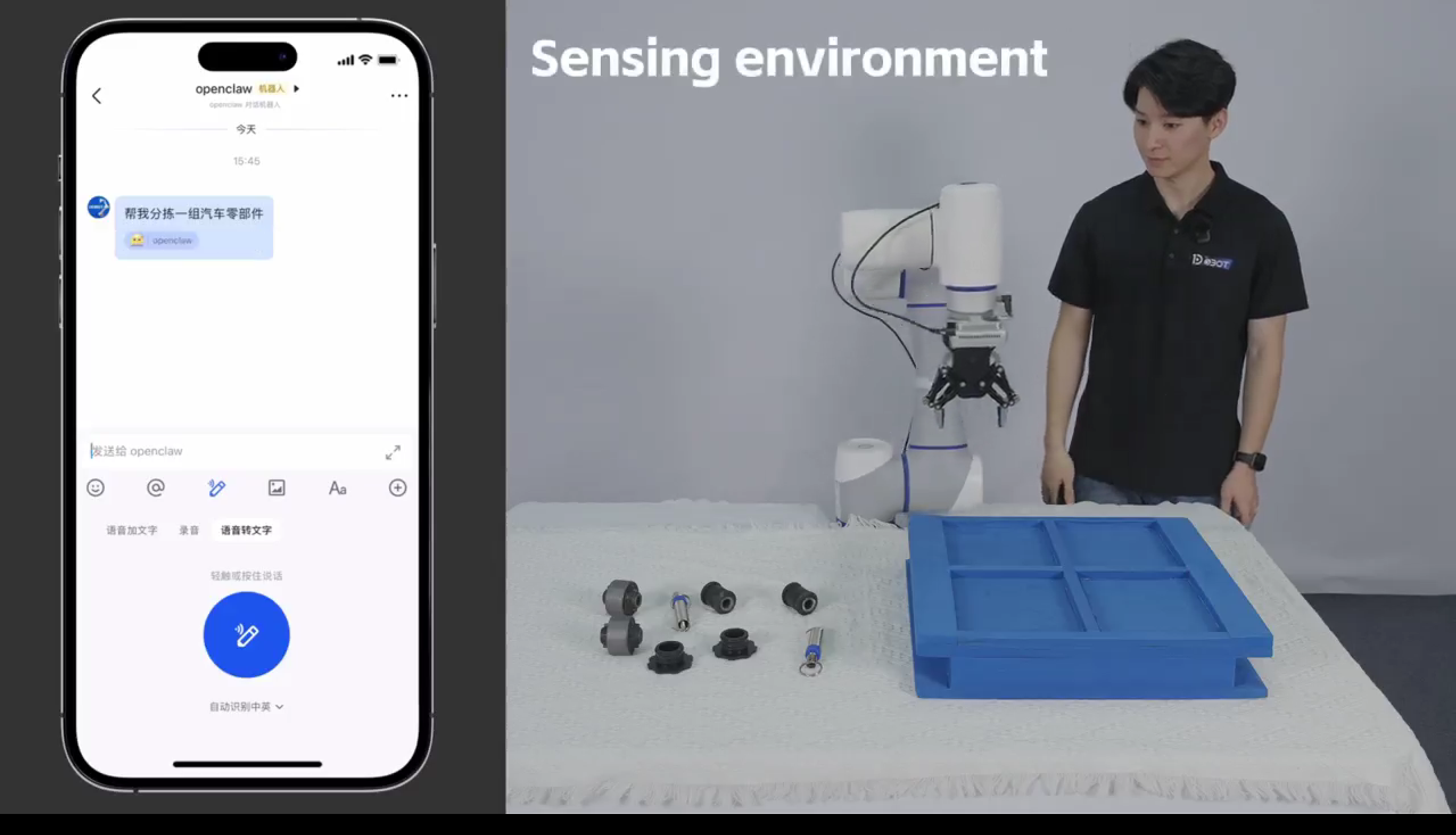
AG Adaptive Gripper + Dobot Crossover Demo | From Automotive Part Sorting to Precision Smart Tangyuan Cooking
Automotive part sorting: The AG adaptive gripper uses large gripping force and ±0.03 mm repeatability to securely grip and precisely place metal parts. Its articulated adaptive structure conforms to irregular surfaces, preventing slippage.
Cooking utensil gripping: The AG gripper uses long stroke and adaptive handle-gripping to hold ladles, spatulas, etc., for scooping. Plug-and-play enables quick task switching without changing the gripper.
This demo shows the AG gripper’s adaptability in mixed-model production and flexible automation — sorting parts on the line or gripping kitchen utensils, a truly multifunctional end effector for cobots.
Application Products
LindenBot × DH-Robotics AG Adaptive Gripper | Joint Demo: Industrial-Grade Embodied AI + High-Force End Effector
The collaborative demonstration with the LindenBot fully showcases the adaptability of the DH-Robotics AG adaptive gripper in flexible automation and smart manufacturing clamping. Its enveloping adaptive structure and adjustable gripping force flexibly handle workpieces of various shapes and materials. Combined with real-time grip feedback and fail-safe drop protection, it delivers a reliable end-effector solution for production line material picking and mixed-model, high-mix production.
Application Products

AG Adaptive Gripper + TetraBot | Power Inspection Gripping
With ±0.03 mm repeatability, the DH-Robotics AG adaptive gripper precisely performs fine tasks such as power substation operations and transmission line clamping. Its articulated adaptive structure, combined with a long stroke and large gripping force, enables stable gripping of cables and equipment of varying diameters, adapting to complex environments like utility poles and overhead lines. Real-time grip feedback confirms proper clamping, while the fail-safe drop protection prevents accidental falls from height. The plug-and-play design allows rapid deployment of inspection robots.
Application Products

PGE Miniature Force-Controlled Gripper + JAKA Robot | Beverage Picking in Supermarkets
At only 18 mm thick, the DH-Robotics PGE gripper can easily fit into tight shelf gaps in retail environments. With continuously adjustable gripping force offering 0.1 N force control precision, it enables slip‑free, damage‑free gripping of beverage bottles, preventing package deformation. The fast open/close time of 0.15 s meets high‑speed sorting demands, while the low‑inertia design of the thin‑profile electric gripper helps increase robot motion speed. This solution provides a reliable end effector for retail picking, unattended vending, and other embodied AI supermarket scenarios, driving the adoption of collaborative robots in commercial service applications.
Application Products


AG Adaptive Gripper + JAKA K1W Wheeled Humanoid | Real-World Loading & Unloading of Automotive Interior Components
In automotive smart manufacturing scenarios, the DH-Robotics AG adaptive gripper leverages its articulated adaptive structure and long stroke to reliably grip irregular automotive parts such as interior trim components and instrument panel brackets. It achieves efficient coordination between heavy-load gripping stability and automotive parts assembly. The plug-and-play design allows the wheeled humanoid robot to quickly adapt to flexible assembly lines, significantly reducing deployment time. This solution provides a reliable large gripping force gripper for automotive interior component loading and unloading, supporting the deployment of wheeled humanoid robots on automotive production lines.
Application Products

AG Gripper + Siasun Wheeled Humanoid | Line-Side Warehouse Material Handling in Action
In smart line-side warehouse scenarios, the DH-Robotics AG adaptive gripper leverages its high-precision design to achieve stable heavy-load gripping and slip-free handling of material boxes, enabling efficient material delivery to production lines and inter-station transfer. Its adjustable gripping force automatically adapts to boxes of different weights, while grip feedback confirms secure clamping in real time. The coordinated movement of a wheeled humanoid robot with the gripper demonstrates the practical value of wheeled humanoid collaborative handling. This in-house logistics automation solution provides manufacturing industries with a reliable end effector for material handling, helping to make production line material flow smarter and safer.
Application Products

AG Adaptive Gripper+Rokae Dual-Arm|Autonomous CPU Assembly&Precision Chip Mounting
In precision electronics manufacturing, the DH-Robotics AG adaptive gripper leverages its high-precision jaws to achieve lossless CPU gripping and accurate CPU socket insertion, effectively protecting sensitive electronic components. Its enveloping adaptive structure conforms to the chip’s edges, while the adjustable gripping force balances gentle handling with reliable clamping. This dual-arm collaborative solution provides a dependable end effector for chip assembly and micro-precision gripping, driving the adoption of embodied AI assembly in the 3C electronics industry.
Application Products

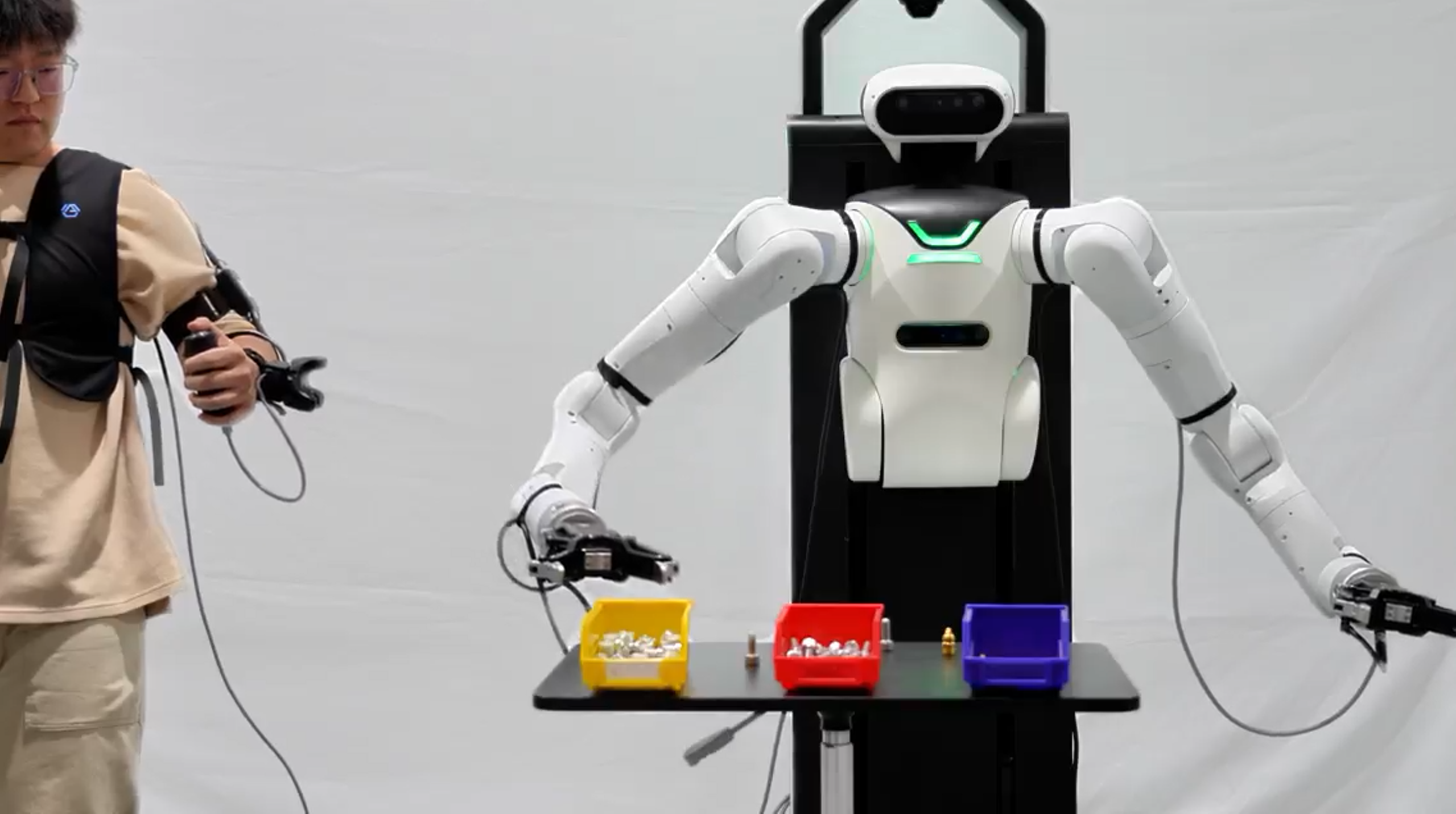
AG Adaptive Gripper + JAKA Dual-Arm | Part Picking & Sorting with Teleoperation in Action
Through dual-arm collaborative teleoperation, the DH-Robotics AG adaptive gripper leverages its ability to adaptively grip irregular parts to reliably perform precision part holding and workpiece sorting. It achieves an efficient integration of teleoperation gripping accuracy and dual-arm collision avoidance. Meanwhile, real-time grip feedback and drop detection continuously monitor the gripping status, preventing accidental part detachment. This solution provides a reliable dual-arm gripper end-effector for human-robot collaboration, embodied AI, and flexible manufacturing, helping to automate and upgrade complex part sorting processes.
Application Products
Randomly grabbing and positioning
The AG series electric gripper and industrial robots were applied to complete the task of random grasping and positioning of special-shaped objects.
Application Products

VR teleoperation crawling application
The DH-3 three-finger adaptive gripper was applied with a collaborative robot arm to realize VR remote grasping through related programs. The collaborative robot arm and electric gripper will follow the operator’s movement to complete the grasping task.
Application Products

Shelf picking and mobile handling
The “electric gripper + collaborative robot + AGV” collocation was applied to complete shelf picking and mobile handling in the new retail field, and the delivery process is unmanned.
Application Products
Battery grab
The PGI-140-80 electric gripper was applied to grab vehicle batteries.
Task difficulty: large size and large stroke, stable grasping, self-locking after power failure.
Application Products

Parts clamping, handling, positioning and assembly
The AG-160-95 adaptive gripper was applied with a collaborative robot to complete the clamping, handling, positioning and assembly of parts.
Application Products
Grab the headset to wipe the glue
After the wireless Bluetooth headset is assembled, the shell package will overflow glue, and the overflow glue will be erased by using the collaborative robot + six-dimensional force sensor.
The gripping force of the pneumatic gripper is unstable, which is easy to cause damage to the surface of the earphone. Therefore, our electric gripper with accurate force control is selected for earphone clamping.
Application Products

Laboratory automation applications
The combination of “DH-Robotics Electric Gripper + Robot Arm” could complete the entire process application of small laboratory automation on the desktop. From gripping, weighing, liquid withdrawal, closing the lid to returning to the original position, the whole process is dominated by electric gripper and mechanical arm, which can realize completely unmanned operation.
Application Products

