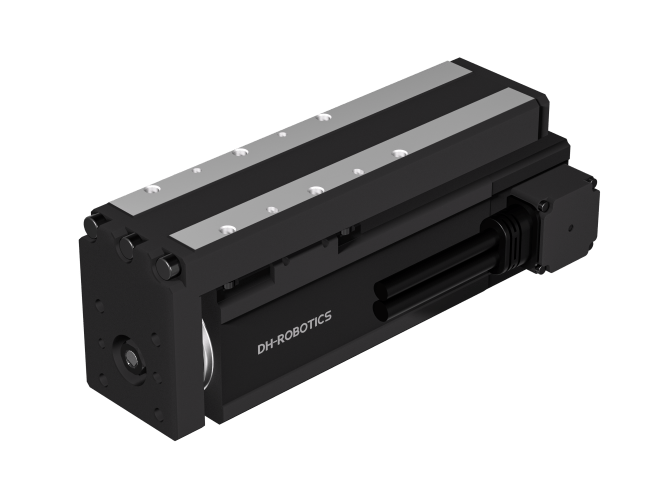
PGE Series
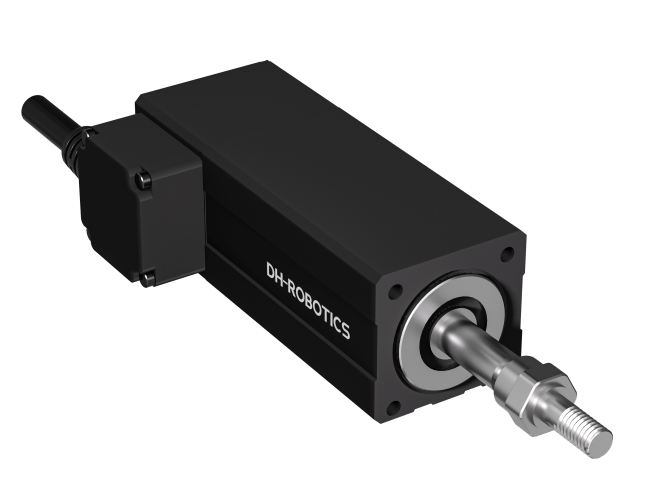
The PGE series from DH-Robotics is a slim-type industrial electric gripper for compact spaces. Despite its small size, it delivers precise force control and high-speed operation, making it ideal for applications requiring efficiency and accuracy in tight working environments. As one of our best-selling models, this mini electric gripper has gained widespread popularity across various industrial automation applications. With the adjustable parameters, our devices allow flexibility in gripping force, speed, and position, delivering optimal performance for different tasks. Experience enhanced efficiency in component handling, assembly, and other operations with our reliable solutions.
Contact Us