















How Does an Electric Gripper Work?
In many ways, automation is changing how we work, and selecting the right tools is the first step toward success. If Artificial Intelligence (AI) acts as the brain of a robot, then the End-of-Arm Tooling (EOAT) serves as its fingers. Among the many options available, the electric gripper is rapidly replacing traditional pneumatic solutions. Keep reading to discover exactly how an electric gripper works and why it might be the perfect upgrade for your application.

So how does an electric gripper work? Why are so many industries making the switch from air to electricity?
The answer lies in the engineering behind the grip.
1. The Core Components: The Anatomy of a Servo-Electric Gripper
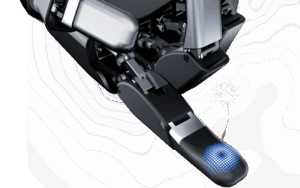
Think of a traditional pneumatic gripper as a simple light switch—it usually only has an “open” or “closed” state. An electric gripper (like the DH-Robotics AG Series) is more like a precision instrument. Its performance relies on three core components working in harmony:
- Brushless DC Servo Motor: This is the source of power. It determines how fast the gripper responds and the maximum force it can apply.
- Gearbox & Transmission: This mechanism converts the high-speed spinning of the motor into the linear or rotational movement of the gripper fingers using planetary gears or screws.
- Integrated Controller & Sensors: Consider this the “cerebellum” of the gripper. It receives instructions and monitors position, current (force), and temperature in real-time.
2. The Physics of “Force Control”: Powering Precision
The most significant advantage of an electric gripper is Force Control.
In a pneumatic system, pressure is often constant, making it difficult to use the same tool to grab a fragile egg and a heavy steel block. However, in an electric system, the physics are on your side:
Current ∝ Torque
By controlling the output current of the motor driver, the gripper can precisely adjust its gripping force.
- Micro Mode: Perfect for handling delicate laboratory slides or tiny electronic parts.
- Heavy Mode: Powerful enough for moving automotive components.
Additionally, Position Feedback allows the gripper to slow down just before contacting the object. This “soft touch” capability significantly reduces the rate of damaged goods.
3. The “Linkage-Type” Secret: How the AG Series Adapts
The DH-Robotics AG Series is often referred to as a Linkage-type adaptive gripper. This specific design is why it shines in the field of Embodied AI.
While ordinary grippers only open and close in a straight line, the AG Series uses a linkage mechanism that mimics the movement of human finger joints:
A. Parallel Gripping
This is used for handling standard cubic or flat objects. The fingers remain vertical and parallel, ensuring the maximum contact area for a secure hold.
B. Enveloping Gripping
When the gripper encounters cylinders, spheres, or irregular shapes (like a water bottle or a piece of fruit), the linkage mechanism automatically “bends” due to the force, wrapping around the object.
Why is this important?
In “Embodied AI” scenarios, a robot cannot always predict the exact size or shape of an object. This mechanical Passive Adaptation allows the gripper to hold almost anything securely without needing complex visual algorithms to guide every move.
4. Closing the Loop: Feedback & Safety
A truly useful electric gripper doesn’t just move; it communicates.
- Status Feedback: Using protocols like Modbus or EtherCAT, the gripper reports back in real-time. It can tell you, “I have grabbed the object,” “The object has dropped,” or “The current opening width is 45.2mm.”
- Self-Locking Safety: The AG Series features a power-off self-locking function. In industrial automation, power outages happen. This physical locking mechanism ensures that even if the power cuts out, the gripper keeps a tight hold on the object, preventing it from falling and causing damage or injury.
5. From Factory Floor to AI Lab: Application Scenarios
Industrial Automation
In the automotive and semiconductor industries, the large stroke of the AG Series (up to 145mm) means a single production line can handle parts of various sizes. You don’t need to change fixtures frequently, which significantly reduces downtime.
Embodied AI
In humanoid robot research, the AG Series supports an open ecosystem for Tactile Sensors. This allows the robot to not just “grab” but also “feel” the texture and hardness of an object, marking a leap from simple mechanical gripping to dexterous manipulation.
Why Choose the AG Series?
If you are considering an upgrade, here is a quick comparison to help you decide how an electric gripper can prove useful to you:
| Feature | Electric Gripper (AG Series) | Traditional Pneumatic Gripper |
| Force Precision | High precision, adjustable (N-level) | Difficult to fine-tune |
| Adaptability | Linkage-type adaptive modes | Fixed stroke only |
| Feedback Mechanism | Full digital real-time feedback | Limited to limit switches |
| Safety | Power-off Self-Locking | Releases when air pressure is lost |
FAQ
1. What is the working principle of the gripper?
Electric grippers, such as the DH-Robotics AG Series, utilize a servo-electric drive system. The core of its operation consists of a motor, gearbox, and position sensors:
- Command Reception: The robot control unit sends specific commands for gripping force, speed, or position via communication protocols.
- Power Conversion: The internal motor rotates according to these commands, and the reduction mechanism translates this rotation into the opening and closing movement of the gripper fingers.
- Adaptive Mechanism: The AG Series uses a unique Linkage-type structure. When the fingers contact an irregularly shaped object, the mechanism automatically “wraps” around the shape (enveloping gripping), achieving physical adaptation without the need for complex software algorithms.
2. What are some real-world uses for robotic grippers?
- 3C & Semiconductors: Used for the assembly and handling of precision electronic components and wafers.
- Automotive Parts: Grabbing various shapes of automotive accessories on automated production lines.
- Medical & Lab Automation: Automated handling of test tubes, samples, and medical instruments.
- Embodied AI: Serving as the “hands” for humanoid or collaborative robots to perform complex picking tasks in unstructured environments.
3. Which type of gripper is best?
- 2-Jaw Parallel Grippers: These provide stable, centered gripping force and are ideal for regular industrial parts.
- 3-Jaw Grippers: These offer higher flexibility and are perfect for automatically centering cylindrical workpieces.
- Adaptive Grippers (like the AG Series): If you are working in semi-structured environments with irregular shapes and varying sizes, a linkage-type gripper with enveloping adaptive capabilities is currently the best solution.
