















In recent years, advancements in robotics have revolutionized the way we interact with machines. At DH-Robotics, we are at the forefront of this transformation, specifically in the realm of dexterous robotic hands. These highly sophisticated devices are now being trained to mimic human hand movements with precision, all thanks to innovative technologies like human motion capture. In this article, we explore how learning from demonstration (LfD) is empowering the next generation of human robot hands, enhancing their adaptability and flexibility.

The Role of Human Motion Capture in Teaching Robotic Hands
The process of teaching a dexterous robotic hand often begins with human motion capture. This technique involves recording the movements of a human hand using specialized sensors and cameras, which are then used to program the robot to replicate those movements. DH-Robotics takes advantage of this method to create highly accurate and responsive human robot hands that are capable of complex tasks. By studying human gestures, the robot learns not only how to move but how to adapt to various environments and situations.
Flexibility and Precision in Dexterous Robotic Hands
One of the key features of the DH-5-6 Dexterous Hand is its precision and flexibility. With a modular design, it can easily be customized for different applications, from medical handling to elderly care assistance. This flexibility makes it ideal for tasks that require a delicate touch, such as those involved in physiotherapy and massage. By using human motion capture, the hand learns to make subtle adjustments in its grip strength and hand orientation, ensuring reliable performance across a wide range of tasks.
Enhancing Performance with Tactile Sensing and Multi-Modal Perception
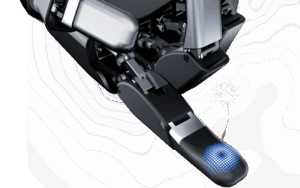
At DH-Robotics, we understand the importance of multi-modal perception in robotic hands. Our DH-5-6 Dexterous Hand comes equipped with optional high-sensitivity tactile sensor arrays, which enable it to recognize objects and adjust its grip accordingly. The tactile sensors provide feedback to the robot, allowing it to adapt to the shape, size, and weight of objects in real time. This capability ensures that the human robot hand can perform tasks with greater dexterity and reduced risk of error.
The Future of Learning from Demonstration: Applications and Advancements
The future of learning from demonstration is incredibly promising, especially with the continuous improvements being made in dexterous robotic hands. From research and education to medical care and home organization, the potential applications are vast. DH-Robotics is committed to pushing the boundaries of what these human robot hands can achieve. As the technology evolves, we anticipate even more innovative features, including enhanced sensing capabilities and greater customization options for various industries.
Conclusion
In conclusion, DH-Robotics is shaping the future of robotic hands by leveraging cutting-edge technologies like human motion capture and tactile sensing. Through learning from demonstration, our dexterous robotic hands are becoming more intuitive, adaptable, and precise, enabling them to perform tasks with the finesse of a human hand. As we continue to explore new possibilities, we are excited to see how these advancements will revolutionize various industries and improve lives.
