















At DH-Robotics, we have been dedicated to advancing the boundaries of human-robot interaction. One of the most exciting frontiers in robotics is the development of human robot hands that can replicate the intricate movements and dexterity of the human hand. The key to achieving this goal lies in adaptive grasp control algorithms that allow dexterous robot hands to respond dynamically to a variety of objects and environments.
Adaptive Grasp Control: The Heart of Dexterity
When designing dexterous robot hands, the challenge isn’t just about replicating human-like movements—it’s about ensuring the robot can adapt to its environment. Adaptive grasp control algorithms enable the human robot hand to adjust its grip in real-time, based on the shape, size, and texture of the object. This is a crucial step towards creating more intelligent robots that can manipulate objects with the same ease and precision as humans. These algorithms consider factors such as force feedback, object positioning, and environmental conditions, ensuring that the dexterous robot hand can hold items securely without causing damage.
The Role of Tactile Sensing in Enhancing Dexterity
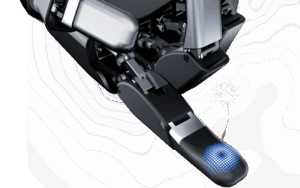
One of the most advanced features of DH-Robotics’ dexterous robot hands is the incorporation of tactile sensing. By integrating high-sensitivity tactile sensor arrays, we enable our robot hands to feel and adjust their grip with remarkable accuracy. This feature allows the robot to sense the object’s shape, weight, and texture, making it capable of performing delicate tasks like handling fragile items. Through the feedback from these sensors, the human robot hand can modify its grip strength or even adjust its hand positioning to optimize interaction with different objects.
Multi-Modal Perception: Combining Algorithms with Sensory Feedback
At DH-Robotics, we take dexterous robot hands a step further by combining adaptive grasp control algorithms with multi-modal perception. This involves using both visual and tactile data to help the robot understand and adapt to its surroundings. By integrating these different sensory inputs, the human robot hand is able to make more informed decisions about how to handle objects in complex environments. Whether it’s sorting items in a warehouse or performing medical tasks, the ability to adapt based on real-time feedback allows the robot hand to function with greater precision and reliability.
Future Applications of Adaptive Grasping Technology
The potential applications for DH-Robotics’ dexterous robot hands are vast and varied. In industries like healthcare, education, and elderly care, where precision and adaptability are essential, these robot hands can revolutionize the way tasks are completed. For instance, in elderly care, human robot hands can assist with daily activities such as dressing or eating, offering support for those with limited mobility. Similarly, in medical handling, a dexterous robot hand can perform delicate surgeries or assist with rehabilitation exercises, making processes safer and more efficient.
A Leap Towards More Intelligent Robotic Systems
At DH-Robotics, we are continually pushing the limits of what human robot hands can do. Through adaptive grasp control algorithms and cutting-edge tactile sensing, we are paving the way for more responsive and reliable dexterous robot hands. As the technology evolves, we envision a future where these robots become an integral part of everyday life, offering solutions to challenges in various industries and improving the way we interact with the world. Our commitment to innovation ensures that we will remain at the forefront of this exciting field, providing advanced, intelligent systems for a wide range of applications.
