Industrial Slim-type Electric Parallel Gripper
Industrial Electric Parallel Gripper
Linkage-type Adaptive Electric Gripper
Collaborative Electric Parallel Gripper
Centric Electric Gripper
Slim-type Electric Parallel Gripper
Heavy-Load Long-Stroke Electric Parallel Gripper
Rotary Electric Gripper
Direct Drive Rotary Gripper
Precision Force Servo Drives
Voice Coil Linear Actuator
Voice coil Rotary Actuator
Direct Drive Linear Rotary Actuator
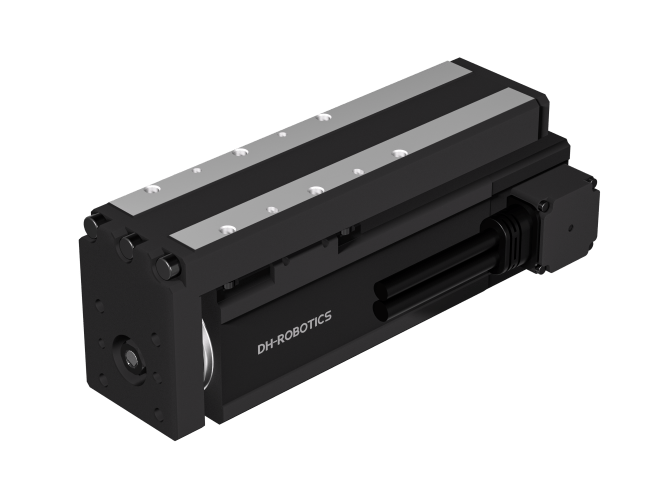
Voice Coil Linear Moudle
Mini electric cylinder
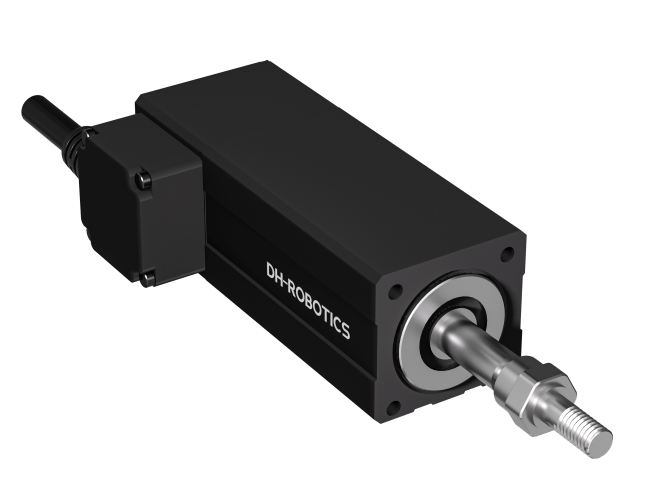
Miniature Electric Rod Type Cylinder
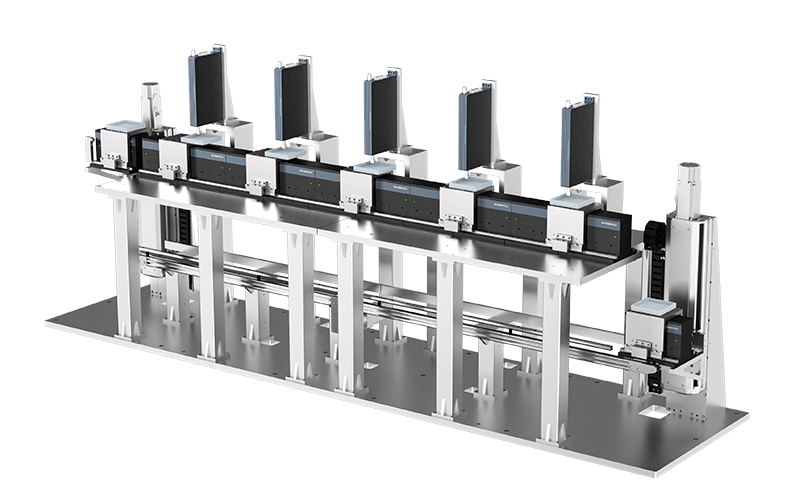
Docking Line
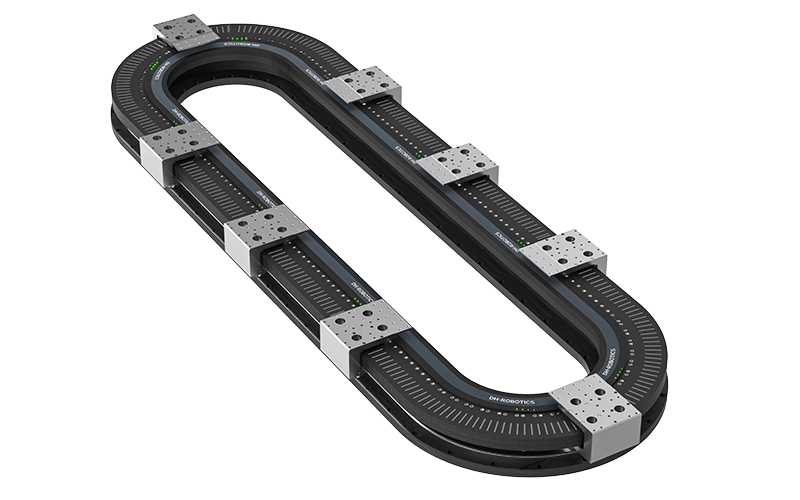
Annular Line
The global manufacturing industry is gradually entering the era of high-end intelligence...
DH-Robotics provides customers in various industries around the world with a variety of intelligent grasping products...
Hundreds of factories are already using DH-Robotics’ products. The number of customers continues to grow rapidly...
Download the product introduction, 3D drawing files, software and materials
Learn about the host computer debugging software
With deep technical background, DH-Robotics has developed the robotic and precision motion control technologies for many years.
Home DH-3
"*" indicates required fields
 微信扫一扫
微信扫一扫